Modifica immagine
Anteprima immagine
Ricerca Google Immagini - Copia l'URL dell'immagine trovata
Scegli una fonte e clicca "Cerca"
La stazione a terra emette due fasci di radioonde che - come illustra la figura 6.112 - permettono di definire altrettanti piani: uno verticale giacente sul prolungamento dell'asse pista, detto piano localizzatore (localizer) e l'altro inclinato di circa 3° e ortogonale al primo, chiamato piano di planata o glide slope (GS). La linea formata dall'intersezione dei due piani rappresenta la traiettoria da seguire per giungere all'atterraggio, chiamata sentiero di avvicinamento.
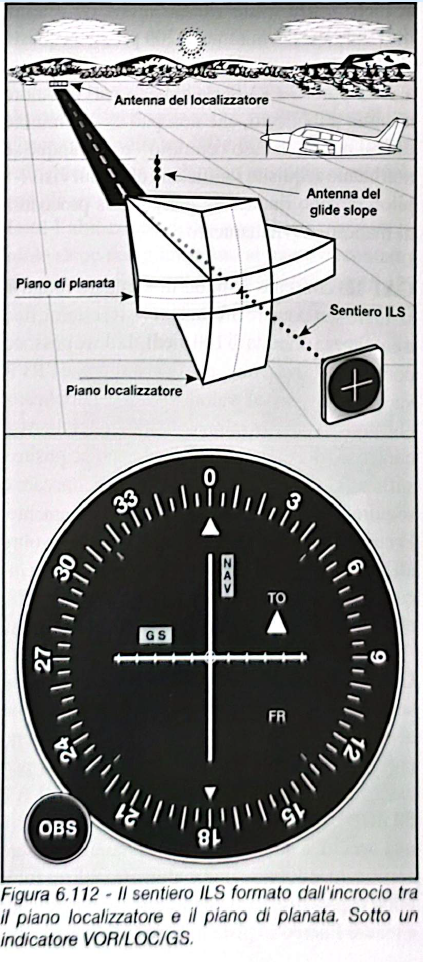
Il pilota sa quando si trova sul sentiero, o quanto piu o meno se ne discosta, mediante l'indicatore LOC/GS, di cui la figura mostra il tipo tradizionale a barre incrociate. E un normale indicatore VOR con l'aggiunta di un indice orizzontale collegato al ricevitore dei segnali UHF emessi dal trasmettitore del glide slope. In alternativa l'indicatore e un HSI (figure 6.90, 6.91 e 6.92).
Di un impianto ILS fanno parte anche i marker (vedi piu avanti) e/o un DME aventi la funzione di informare i piloti della distanza dalla pista, il sentiero luminoso antistante la pista (figura 1.18) e almeno un trasmissometro (figura 5.31) che fornisce l'RVR sulla zona di contatto.
A seconda della precisione di guida che sono in grado di fornire, gli impianti ILS si distinguono nelle seguenti tre categorie:
| Categoria | Altezza minima | RVR minima | Note |
|---|---|---|---|
| CAT I | 200 piedi | 550 metri | Da questo punto proseguire a vista se RVR sufficiente |
| CAT II | 100 piedi | 350 metri | Richiede abilitazione IR, radar altimetro e autopilota |
| CAT III A | Fino al contatto | 200 metri | Abilitazione specifica, radar altimetro e 3 autopiloti (autoland) |
| CAT III B | Fino al contatto | 50 metri | Come CAT III A |
La guida di direzione e fornita dal trasmettitore del piano localizzatore, la cui antenna e installata al termine della pista (figura 6.113). Abbiamo gia avuto modo di dire che - operando nella banda VHF da 108.10 a 111.95 MHz con intervalli di 50 KHz e con primo decimale dispari - dispone di 40 canali.
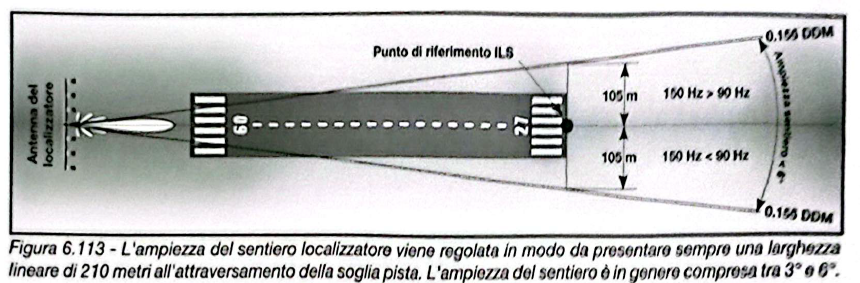
Il piano verticale che contiene il prolungamento dell'asse della pista e concretizzato mediante la modulazione della portante con segnali da 150 e da 90 Hz, rispettivamente a destra e a sinistra del prolungamento (visto dagli aerei in avvicinamento), cosi da creare lungo di esso una zona di equisegnale.
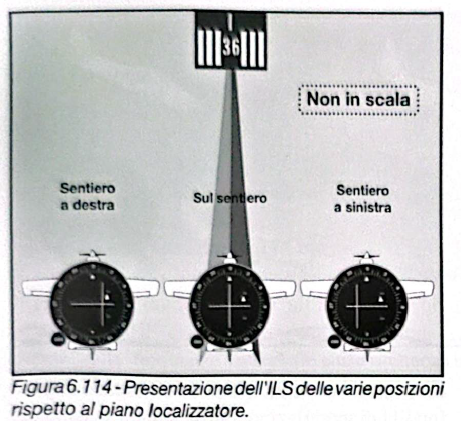
La figura 6.114 mostra che il ricevitore di bordo capta pertanto entrambi i segnali con la stessa intensita e ha l'indice al centro, quando si trova sul prolungamento della pista; mentre ne capta uno con intensita tanto maggiore e l'altro con intensita tanto minore quanto piu si trova scostato da una parte o dall'altra del prolungamento della pista.
I limiti laterali sono definiti dal valore 0,155 della differenza di profondita di modulazione DDM (Difference in Depth of Modulation) tra i due segnali da 90 e 150 Hz, sufficiente per mandare a fondo scala il CDI dell'indicatore di bordo. All'interno dei limiti laterali, il CDI si trova tanto piu vicino al centro quanto piu l'aereo si trova vicino al prolungamento dell'asse della pista.
L'identificazione del localizzatore e realizzata mediante la modulazione della portante con un segnale da 1.020 Hz che riproduce in alfabeto Morse le due o tre lettere del nominativo della stazione, sovente precedute dalla lettera I. La ricezione da bordo dei segnali del localizzatore e assicurata dalla stessa antenna preposta alla ricezione dei segnali VOR.
Il localizzatore puo trasmettere anche lungo il prolungamento della pista opposto a quello che riceve i normali avvicinamenti, creando cosi un sentiero di avvicinamento "inverso" denominato back course, per distinguerlo da quello normale chiamato front course (figura 6.115).
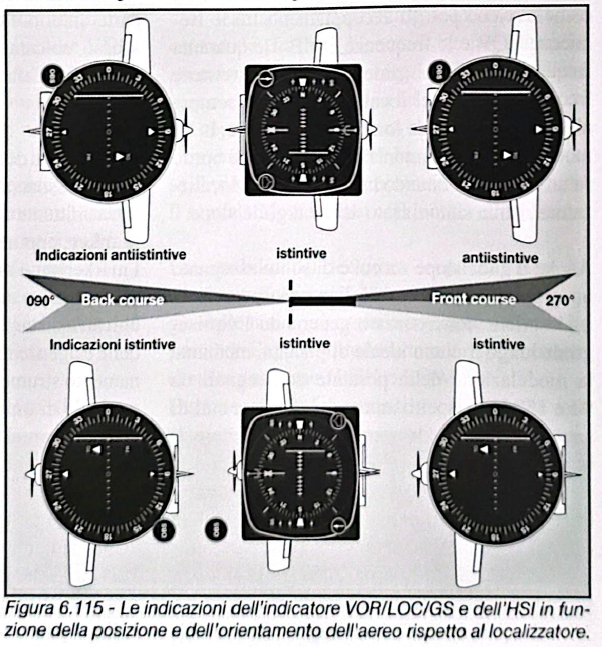
Poiche la modulazione della portante con i segnali da 150 e 90 Hz ha luogo sullo stesso lato della pista sia lungo il front course sia lungo il back course, i normali indicatori VOR/LOC danno indicazioni istintive per gli aerei in avvicinamento e antiistintive per quelli in allontanamento, lungo il front course; viceversa lungo il back course danno indicazioni istintive per gli aerei in allontanamento e antiistintive per quelli in avvicinamento.
Il trasmettitore del piano di planata GS (Glide Slope) e installato a una distanza variabile tra 750 e 1.250 piedi dalla soglia di avvicinamento, disassato rispetto alla mezzeria della pista di una distanza variabile tra 400 e 600 piedi, comunque sufficiente a far si che non costituisca ostacolo per gli aerei in atterraggio.
Data l'ubicazione disassata del trasmettitore, il glide slope non giunge fino al punto di contatto, ma si interrompe a un'altezza variabile tra 18 e 27 piedi dalla superficie della pista. Il punto situato sulla verticale dell'intersezione dell'asse della pista con la soglia all'altezza di attraversamento del sentiero di discesa, prende il nome di punto di riferimento dell'ILS (figura 6.113).
Il trasmettitore del glide slope funziona in onde UHF su frequenze comprese tra 329.15 e 335.00 MHz con intervalli di 150 KHz. Le onde UHF furono scelte perche garantiscono una migliore direttivita rispetto alle VHF.
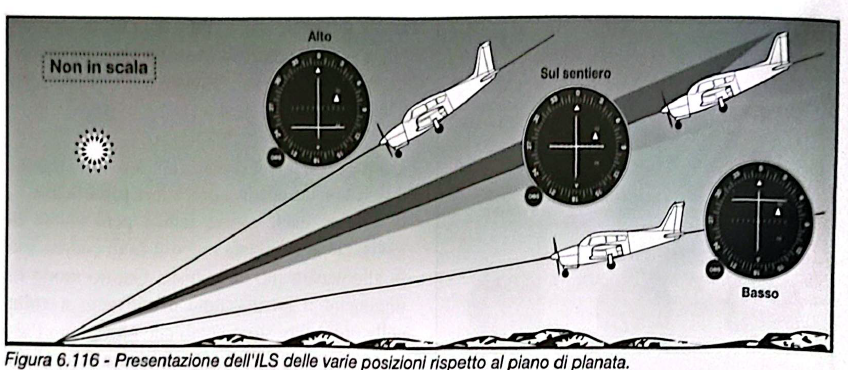
Anche il glide slope - a cui e di solito assegnato un angolo di pendenza di 3° e uno spessore di 1,4° - viene concretizzato generando l'equisegnale lungo il piano ideale di planata, mediante la modulazione della portante con segnali da 90 e 150 Hz, rispettivamente al di sopra e al di sotto.
La figura 6.116 mostra che il ricevitore di bordo capta pertanto entrambi i segnali con la stessa intensita e ha l'indice orizzontale al centro, quando si trova sul piano di planata; mentre ne capta uno con intensita tanto maggiore e l'altro con intensita tanto minore quanto piu si trova scostato al di sopra o al di sotto.
I limiti superiore e inferiore vengono fatti coincidere con il valore 0,0875 della differenza di profondita di modulazione, sufficiente per mandare a fondo scala l'indice orizzontale dell'indicatore di bordo. All'interno dei limiti l'indice si trova tanto piu vicino al centro quanto piu l'aereo si trova vicino al piano di planata.
I segnali del trasmettitore del glide slope vengono diretti solo verso il front course, e sono pertanto inutilizzabili per gli avvicinamenti back course. La loro ricezione avviene tramite una piccola antenna a V simile a quella del VOR, montata nella parte anteriore dell'aereo. Sugli aerei leggeri e spesso ubicata nella parte alta del parabrezza all'interno della cabina, oppure sotto la fusoliera.
Per la misura della distanza dalla pista gli impianti ILS si possono avvalere di un DME coubicato con la trasmittente del glide slope, oppure di radiofari marker, oppure di entrambi i sistemi.
I marker sono radiofari direzionali che emettono verticalmente sulla frequenza comune di 75 MHz, ubicati a distanze variabili dalla pista in funzione delle esigenze imposte dalla procedura di avvicinamento strumentale. Il pilota sa di passare sulla verticale di un marker perche ne ode il segnale trasmesso in alfabeto Morse, e vede l'apposita spia lampeggiare con la stessa sequenza.
| Marker | Nome | Identificazione Morse | Colore luce |
|---|---|---|---|
| OM | Outer Marker (esterno) | Serie continua di linee | Blu |
| MM | Middle Marker (centrale) | Serie continua di linea-punto | Ambra |
| IM | Inner Marker (interno) | Serie continua di punti | Bianco |
Per segnalare il sorvolo di punti particolari lungo certe rotte ATS, specialmente nelle zone montuose, vengono usati i marker di aerovia, in tutto simili a quelli degli impianti ILS.
L'antenna di bordo preposta alla ricezione dei segnali dei marker ha generalmente la forma di "pinna" dalle dimensioni del palmo di una mano, ed e installata nella parte inferiore della fusoliera, parallelamente all'asse longitudinale dell'aereo.
Il ricevitore ILS e un normale ricevitore NAV (figura 6.74) con l'aggiunta all'interno di un ricevitore UHF che si sintonizza automaticamente sulle frequenze del glide slope quando vengono sintonizzate quelle del localizzatore. E collegato a un unico indicatore (figura 6.112), il cui CDI indica la posizione dell'aereo rispetto al piano localizzatore, mentre l'indice orizzontale indica quella rispetto al glide slope. Il ricevitore e l'indicatore ILS sono pertanto VOR/LOC/GS.
Il CDI si trova infatti collegato al ricevitore del localizzatore - e si sposta quindi in modo da indicare la posizione del piano equisegnale che costituisce la guida di direzione - mentre l'indice orizzontale compie la stessa funzione rispetto al piano che costituisce la guida di planata. Mantenendo entrambi gli indici al centro durante l'avvicinamento, l'aereo raggiunge il punto di contatto lungo la mezzeria della pista.
Quando e collegato al ricevitore del localizzatore il CDI ha una sensibilita circa quattro volte maggiore che non quando e collegato al ricevitore VOR: dovendo infatti definire l'ampiezza angolare di figura 6.113, si sposta a fondo scala quando si trova a soli 2° ÷ 3° dal piano del localizzatore, mentre con il VOR si porta a fondo scala quando si trova a 10° dalla radiale selezionata.
L'indice del glide slope e ancora piu sensibile, dovendosi portare a fondo scala quando si trova a soli 0,4°÷0,7° dal piano equisegnale.

Come illustrato in figura 6.117, il ricevitore dei marker e sovente incorporato nella centralina audio. Utilizza tre luci di colore bianco, blu e ambra - contrassegnate dalle lettere A (airway), O (outer) e M (middle) - che lampeggiano quando l'aereo transita sulla verticale dei marker, rispettivamente interno, esterno e centrale.
La sensibilita del ricevitore - e quindi l'intensita e la durata del segnale Morse nonche del lampeggio delle luci - puo essere aumentata o diminuita portando l'apposito commutatore rispettivamente sulla posizione HIGH o LOW. Durante gli avvicinamenti - per stabilire con maggior precisione il momento in cui l'aereo transita sulla verticale del marker - e consigliabile tenere il commutatore sulla posizione LOW.
Fin da quando fu inizialmente concepito e sviluppato per scopi bellici, il radar ha dato prova di essere una delle creazioni piu importanti della tecnologia aeronautica. Al punto che oggi l'aviazione civile, senza l'ausilio del radar per la separazione e la guida degli aerei nel servizio di controllo del traffico aereo, sarebbe letteralmente paralizzata.
Anche se il vettoramento radar - cosi come ogni altro tipo radioassistenza - e principalmente destinato al traffico IFR, il servizio radar puo essere richiesto anche da chi opera in VFR, sia per la guida di navigazione sia per ottenere informazioni di traffico molto precise.
Il modo in cui i pipistrelli riescono a volare e orientarsi di notte o in grotte completamente buie, evitandone le pareti e le numerose stalattiti e stalagmiti che a volte le rendono veri labirinti, e un argomento di grande interesse non solo per gli zoologi. Durante studi svolti per svelare il mistero del volo dei pipistrelli, e stato compiuto l'esperimento di imbavagliare alcuni di questi animali, e di tappare loro contemporaneamente anche le orecchie: una volta rimessi in liberta, non erano piu in grado di evitare gli ostacoli.
Da cio si e concluso che l'abilita dei pipistrelli di navigare senza vedere e dovuta all'emissione di grida (la cui frequenza cade nel campo degli ultrasuoni non udibili dall'orecchio umano), aventi lo scopo di essere riflesse dai corpi circostanti. Gli echi delle loro grida permettono ai pipistrelli di "udire" gli ostacoli, e quindi di evitarli.
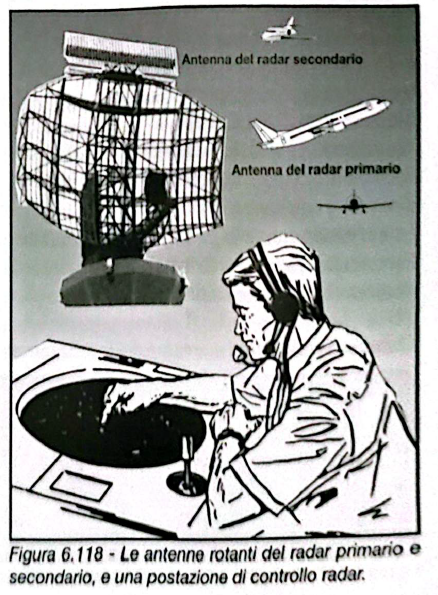
Da un'antenna direzionale, rotante con velocita variabile da 6 a 60 giri al minuto primo a seconda delle necessita (figura 6.118), viene emesso uno strettissimo fascio di impulsi di microonde: quando gli impulsi incontrano un corpo solido sul loro cammino, subiscono il fenomeno di riflessione, grazie al quale parte della loro energia puo tornare all'antenna che li ha emessi.
L'apparato ricevente misura il tempo impiegato dagli impulsi a tornare all'antenna, e quindi calcola la distanza alla quale si trova il corpo che ha generato la riflessione. La posizione occupata dall'antenna rispetto al nord nel momento in cui riceve l'eco, permette di determinarne il rilevamento rispetto alla stazione radar.
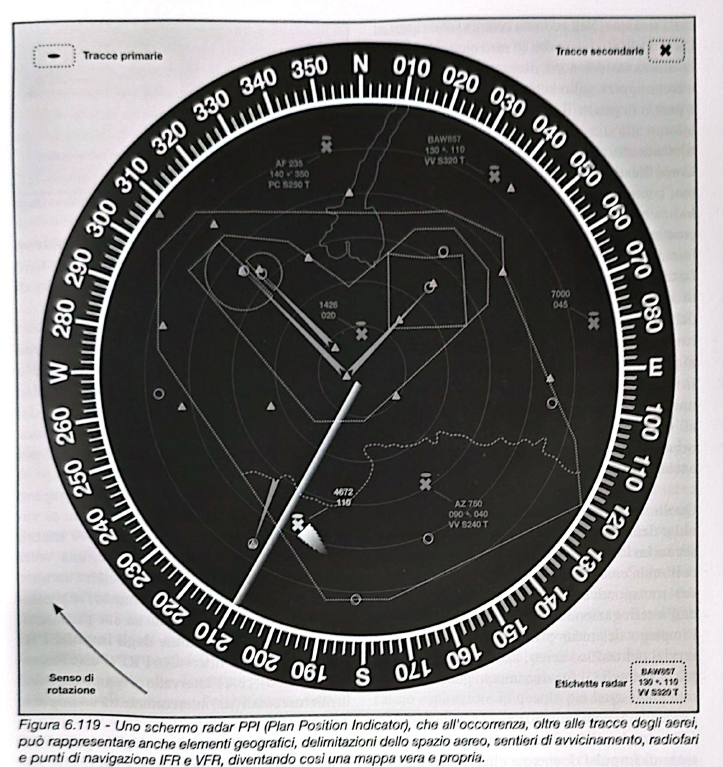
L'oggetto che ha generato l'eco, esattamente localizzato, viene rappresentato sullo schermo di un tubo catodico mediante una traccia luminosa (figura 6.119). Il centro dello schermo rappresenta la posizione dell'antenna. Intorno sono tracciati alcuni cerchi concentrici equidistanti che aiutano a valutare la distanza delle tracce dalla stazione. Sulla corona esterna sono riportati i 360° dell'orizzonte con lo zero coincidente con la direzione del nord magnetico.
Come illustra la figura 6.119, questo tipo di schermo, conosciuto con la sigla PPI (Plan Position Indicator), o indicatore di posizione in pianta, e continuamente "spazzato" da una linea radiale luminosa che ruota alla velocita dell'antenna. Le tracce si evidenziano sullo schermo nell'istante in cui la linea (e quindi il fascio emesso dall'antenna) attraversa la loro posizione, per poi rimanere visibili con luminosita decrescente fino al giro successivo dell'antenna.
In questo modo ogni traccia lascia dietro di se una scia luminosa (afterglow) che consente all'operatore di conoscere non solo la posizione occupata dall'oggetto che ha generato l'eco, ma anche la direzione nella quale si muove.
Quello fin qui descritto e il funzionamento del radar denominato primario per distinguerlo dal secondario, il quale non utilizza la riflessione dell'onda emessa dall'antenna, bensi la risposta del transponder di bordo quando sollecitata dall'interrogazione da terra. Prima di descrivere l'impiego del radar primario e secondario nei servizi del traffico aereo, analizziamone un po' piu in dettaglio il funzionamento generale.
I radar impiegati in aviazione - a eccezione del radar altimetro - funzionano mediante la trasmissione di impulsi di energia elettromagnetica. Il radar altimetro trasmette in onda continua perche deve riceverne la riflessione da distanze estremamente ridotte (da 2500 piedi fino a pochi piedi dal suolo durante gli avvicinamenti di precisione di CAT II e III) - alle quali gli impulsi non possono essere utilizzati per le ragioni spiegate di seguito.
Come accennato piu sopra, un apparato radar e costituito da un trasmettitore, un'antenna trasmittente-ricevente, un ricevitore e un display. All'interno del trasmettitore si trova il modulatore che provvede a generare gli impulsi della durata e della forma richieste, e un magnetron che provvede ad amplificarli fornendo loro l'energia necessaria per compiere il viaggio di andata e ritorno.
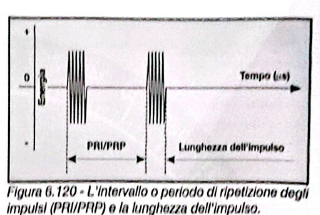
Dopo l'emissione di un impulso, l'antenna viene automaticamente sconnessa dal trasmettitore e collegata al ricevitore per il tempo che l'impulso impiega a tornare dopo essere stato riflesso dal bersaglio. Una volta ricevuta l'energia riflessa, l'antenna viene ricollegata al trasmettitore per l'emissione dell'impulso successivo.
La frequenza di ripetizione degli impulsi e il parametro che determina la portata del radar, cioe la distanza (range R) massima alla quale esso puo rilevare un oggetto: quanto maggiore e la distanza, tanto minore deve essere la PRF, perche il tempo di ritorno dell'impulso - e percio quello da attendere per l'emissione del successivo - e tanto maggiore quanto maggiore e la distanza.
(La distanza va moltiplicata per 2 perche l'impulso, dovendo andare e tornare, percorre una distanza doppia di quella esistente tra l'antenna e il bersaglio). Cio fatto si puo calcolare la PRF espressa in pps sapendo che e l'inverso del PRI:
Esempio: se a un radar si vuole assegnare una portata (R) di 200 km, con quale PRF deve funzionare?
Viceversa, conoscendo la PRF si ricava R espressa in km facendo:
La lunghezza dell'impulso concorre anche a determinare la risoluzione del radar, cioe la sua capacita di distinguere (o discriminare) l'uno dall'altro oggetti tra loro vicini. Infatti, riferendoci ancora all'esempio sopra citato, seppure l'impulso lungo 2 us riesce a distinguere un oggetto posto a 300 metri e a generarne la traccia sullo schermo radar, quando gli oggetti posti a 300 metri sono due ma disposti a meno di 300 metri l'uno dall'altro, la traccia generata sullo schermo e sempre una sola, perche entrambi gli oggetti vengono "illuminati" contemporaneamente dallo stesso impulso.
La larghezza in gradi (L°) del fascio esploratore formato da impulsi di lunghezza d'onda (lambda) emessi da un'antenna paraboloide di diametro (D), e data dalla relazione sopra. Dalla quale si deduce che per diminuire la larghezza del fascio e aumentare il potere di risoluzione di un radar, si puo diminuire la lunghezza d'onda aumentando la frequenza, oppure si puo aumentare il diametro dell'antenna (oppure si possono fare entrambe le cose).
Il radar venne sviluppato durante la seconda guerra mondiale per scopi essenzialmente militari volti a rilevare la presenza di aerei nemici, ma in seguito venne perfezionato e comincio a trovare applicazione anche in campo civile, specialmente per la sorveglianza e il controllo del traffico aereo. Nacquero cosi i radar di sorveglianza ATC, che in base al tipo di servizio cui sono preposti vengono divisi nelle seguenti tre categorie generali.
ARSR (Air Route Surveillance Radar), di solito utilizzato dagli ACC (Area Control Center) per fornire il Servizio di Controllo d'Area. La portata degli ARSR e pertanto estesa fino a comprendere tutte le aree terminali e la rete delle aerovie esistenti in una determinata porzione di spazio aereo, di solito coincidente con una CTA (Control Area). Essendo un sistema a vasto raggio, la portata necessaria e ottenuta utilizzando grandi potenze di emissione (500 KW) e frequenze dell'ordine di 1 GHz (lambda = 30 cm).
ASR (Airport Surveillance Radar), di solito utilizzato dagli APP (Approach Control) per fornire il Servizio di Controllo di Avvicinamento. La portata degli ASR e pertanto in genere limitata alla copertura dello spazio circostante uno o piu aeroporti, spesso coincidente con i limiti di una zona di controllo (CTR). La frequenza utilizzata e dell'ordine dei 3 GHz (lambda = 10 cm). Con l'aiuto dell'ASR i controllori possono rendere piu scorrevole e sicuro il traffico in partenza e in avvicinamento, fornendo ai piloti i vettoramenti che assicurano le necessarie separazioni e permettono di abbreviare i tempi di volo.
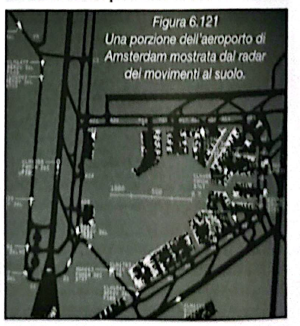
SMR (Surface Movement Radar), ASDE (Airport Surveillance Detection Equipment) o ASMI (Airfield Surface Movement Indicator), di cui sono dotati i grandi aeroporti per consentire ai controllori di Torre di sorvegliare l'area aeroportuale anche in assenza di visibilita. Dovendo possedere alta risoluzione ed essere capace di rilevare da breve distanza le caratteristiche salienti dell'aeroporto (piste, piazzali, vie di rullaggio, edifici, eccetera) nonche gli aeromobili e mezzi operanti sull'area di manovra, il radar dei movimenti al suolo (figura 6.121) deve avere:
I primi radar di sorveglianza ATC erano costituiti solo da apparecchiature in tutto simili a quella descritta nel paragrafo precedente, cui e dato il nome di radar primario di sorveglianza PSR (Primary Surveillance Radar); il quale - per le esigenze di controllo del traffico aereo presenta pero le seguenti notevoli limitazioni:
I primi ad avvertire la necessita di individualizzare le tracce radar per poterle distinguere l'una dall'altra furono - come al solito - i militari; che svilupparono percio il sistema IFF (Identification Friend or Foe), grazie al quale e possibile distinguere gli aerei amici da quelli nemici. Successivamente il sistema entro in uso anche nell'aviazione civile, dove e chiamato radar secondario di sorveglianza SSR (Secondary Surveillance Radar).
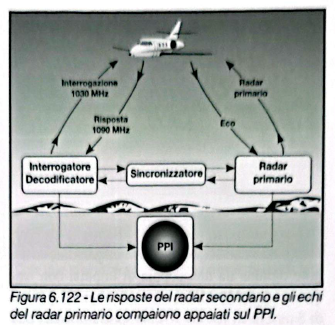
Il sistema di sorveglianza radar ATC e sempre costituito sia dal radar primario sia da quello secondario. Anche se i due sistemi funzionano in modo indipendente l'uno dall'altro, le due antenne - montate coassialmente (figura 6.118) - ruotano in sincronia, e le diverse tracce primarie e secondarie compaiono appaiate sullo schermo.
Poiche il radar secondario consente al controllore di svolgere agevolmente il suo compito, potrebbe venire naturale di considerare superfluo il radar primario: non bisogna invece dimenticare che ci sono anche aerei non equipaggiati con il transponder, e che si puo sempre verificare un'avaria al radar secondario o al transponder.
Il funzionamento del radar secondario e concettualmente simile al funzionamento del DME, solo che il "dialogo" tra la stazione radar e gli aerei ha luogo con sequenza inversa: l'interrogazione - anziche partire dall'aereo verso il transponder della stazione a terra come nel caso del DME - parte infatti da terra diretta verso gli aerei, a bordo dei quali si trovano i transponder. La risposta - ricevuta dalla stessa antenna che ha provveduto a emettere l'interrogazione - anziche essere trasformata in un valore di distanza, viene trasformata in una traccia sullo schermo radar.
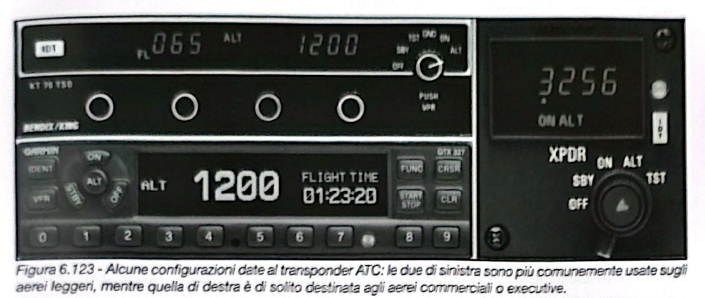
L'equipaggiamento di terra del radar secondario (figura 6.122), oltre che dall'antenna, e percio costituito da un interrogatore e da un decodificatore, da un sincronizzatore che abbina le tracce primarie con quelle secondarie, e da uno schermo sul quale vengono trasferite entrambe le tracce. L'equipaggiamento di bordo e invece costituito dal transponder o radar beacon (figura 6.123), la cui antenna ricetrasmittente omnidirezionale - a forma di pinna o di chiodo con capocchia sferica - e in genere applicata al ventre della fusoliera.
Poiche la funzione del transponder e di rispondere automaticamente ogni volta che riceve un'interrogazione, e dato che tale azione puo essere assimilata alla ripetizione pedissequa di cio che si ode, e venuto naturale a chi per primo impiego il sistema IFF di chiamare il transponder "pappagallo". E poiche in inglese il verso stridulo del pappagallo viene espresso con la parola squawk (pronuncia squok), il termine e ufficialmente entrato nell'inglese aeronautico sia come sostantivo sia come verbo, con il significato di codice inserito o da inserire nel transponder, oppure di far funzionare il transponder.
Per il pilota il transponder e forse l'apparato piu semplice da gestire: non richiede infatti cambi di frequenza in quanto tutte le stazioni radar trasmettono sempre e solo su 1.030 MHz, e tutti i transponder rispondono sempre e solo su 1.090 MHz. Inoltre, una volta acceso, il transponder risponde a tutte le interrogazioni sufficientemente forti che riceve, da qualsiasi stazione SSR esse provengano, senza emettere alcun segnale audio e senza la necessita che il pilota identifichi le diverse stazioni.
Durante ogni giro l'antenna SSR emette normalmente da venti a quaranta interrogazioni, costituite ognuna da una coppia di impulsi con frequenza di 1.030 MHz, alternativamente spaziati di 8 us e di 21 us. La diversa spaziatura tra i due impulsi di un'interrogazione costituisce il modo di interrogazione: 8 microsecondi e la spaziatura assegnata al modo A, mentre 21 microsecondi e quella assegnata al modo C.
Ogni codice numerico di risposta in modo A e determinato dalla posizione di quattro selettori, ognuno dei quali controlla tre dei dodici possibili impulsi centrali, e puo essere disposto in otto posizioni identificate dalle cifre da 0 a 7. Utilizzando la presenza o meno degli impulsi, le cifre da 0 a 7 vengono composte in codice binario. Poiche le cifre disponibili per ognuno dei quattro selettori sono otto (da 0 a 7 compresi), i codici selezionabili sono 4.096 (84).
| Codice | Significato |
|---|---|
| 7700 | Emergenza (MAYDAY o SOS) |
| 7600 | Avaria radio |
| 7500 | Atti di pirateria a bordo (HIJACK) |
| Posizione | Funzione |
|---|---|
| OFF | Per spegnere l'apparato |
| SBY | Standby - apparato acceso senza rispondere alle interrogazioni |
| ON | Funzionamento solo in modo A |
| ALT | Funzionamento in modo A e C (richiede codificatore di quota) |
| TEST | Per provare l'integrita dei circuiti |
Altro comando del transponder e il pulsante IDENT con cui viene emesso l'impulso di identificazione, grazie al quale la traccia sullo schermo radar e messa in particolare evidenza per un periodo variabile da 15 a 30 secondi. Quando il controllore richiede l'identificazione basta premere momentaneamente il pulsante IDENT: i circuiti elettronici provvedono automaticamente all'emissione dell'impulso di identificazione per il periodo predeterminato.
Il modo S - concepito negli anni 70 del secolo scorso - fu inizialmente chiamato DABS (Discrete Address Beacon System), nome che fa capire come il sistema risponda se la domanda viene indirizzata in modo discreto o selettivo.
Ufficialmente adottato dall'ICAO agli inizi degli anni novanta, il modo S si sta gradualmente diffondendo sia a bordo degli aerei, sia nei centri di controllo del traffico aereo dei Paesi tecnologicamente avanzati. Molti Stati della regione europea hanno gia reso obbligatoria la disponibilita del modo S a bordo degli aeromobili che operano in IFR.
Gli aeromobili dotati di transponder modo S possiedono un proprio codice individuale permanente o indirizzo, costituito da 24 cifre binarie. L'indirizzo individuale modo S e assegnato a ogni aeromobile al momento dell'immatricolazione - o al momento dell'installazione del nuovo transponder quando l'aeromobile e gia immatricolato - dall'Autorita Aeronautica dello Stato di Immatricolazione (ENAC per l'Italia).
Cosicche ogni aereo, oltre al codice di quattro cifre assegnato di volta in volta, "squawkka" una risposta formata da 112 bit contenente l'identificazione dell'aeromobile utilizzata nella casella 7 del piano di volo, cioe il nominativo (I-ABCD) o il numero del volo (AZ 123).
Il computer della stazione a terra, analizzate le risposte alle interrogazioni generali, identifica gli aerei che sono di suo interesse e - tramite gli indirizzi - continua a dialogare solo con i loro transponder, escludendo tutti gli altri. Cio significa che i transponder modo S rispondono a tutte le stazioni a terra solo in occasione delle interrogazioni generali, mentre per il tempo restante rispondono solo alle interrogazioni specifiche richieste dalla stazione a terra che usa il loro indirizzo.
I transponder modo S sono compatibili con il sistema SSR tradizionale, per cui il loro impiego non richiede ai piloti procedimenti particolari, salvo l'uso della funzione GND (ground) invece di Standby quando operano a terra sui grandi aeroporti dotati di radar dei movimenti al suolo: con questa funzione il transponder risponde alle interrogazioni senza dialogare con i transponder degli altri aerei, e quindi senza innescare gli allarmi TCAS di quelli in volo.
Le risposte dei transponder ricevute dall'antenna di una stazione radar, dopo la decodificazione vengono inviate a un computer che le elabora e le immagazzina nella propria memoria. Tramite la tastiera del computer, il controllore puo scegliere di far comparire solo le tracce del radar primario o solo quelle del radar secondario, di eliminare le tracce secondarie che non gli servono o che non sono di sua competenza, e di accompagnare il simbolo di posizione delle tracce secondarie da una copiosa messe di dati alfanumerici riguardanti le condizioni di volo di ogni aereo, che nel loro insieme sono chiamati "etichetta radar" (radar label).
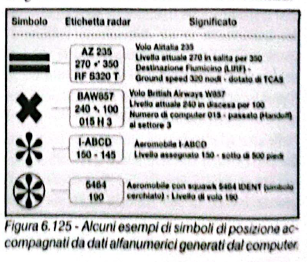
Il simbolo di posizione delle tracce secondarie puo essere costituito da due sbarrette adiacenti, da una X, da un asterisco o da qualsiasi altro simbolo fatto generare al computer, al quale viene affiancata o sovrapposta la traccia del radar primario. La figura 6.119 mostra alcune tracce primarie e secondarie sullo schermo, mentre le figure 6.121 e 6.125 mostrano alcuni simboli di posizione accompagnati dai dati alfanumerici digitati dal controllore e generati dal computer.
Il computer offre inoltre al controllore la possibilita di riprodurre sullo schermo numerosi simboli grafici rappresentanti le caratteristiche fisiche salienti del terreno (linee di costa, fiumi, laghi, citta, eccetera); i contorni degli spazi aerei controllati e riservati (CTR, TMA, aerovie, zone proibite, eccetera); i simboli dei radioaiuti e delle intersection, nonche i prolungamenti degli assi delle piste strumentali.
Come illustra la figura 6.119, lo schermo radar assume in tal modo l'aspetto di una carta di navigazione, sulla quale diventa estremamente facile stabilire l'esatta posizione di ogni singola traccia rispetto al terreno.
La superficie esterna dello schermo e inoltre ricoperta con un reticolo di linee sottilissime (non mostrate in figura) che il controllore puo muovere a suo piacere in modo da unire direttamente qualunque coppia di punti dello schermo. Leggendo di volta in volta l'orientamento della congiungente di due punti, il controllore e in grado di comunicare ai piloti i valori di prua magnetica da assumere durante i vettoramenti.
| Concetto | Valore |
|---|---|
| Banda VHF localizzatore | 108.10 - 111.95 MHz |
| Canali localizzatore | 40 canali |
| Larghezza lineare localizzatore alla soglia | 210 metri (700 piedi) |
| Larghezza angolare localizzatore | 3° - 6° |
| Angolo glide slope | 3° |
| Frequenze glide slope (UHF) | 329.15 - 335.00 MHz |
| Frequenza marker | 75 MHz |
| Identificazione localizzatore | 1.020 Hz (Morse) |
| CAT I - Altezza minima / RVR | 200 ft / 550 m |
| CAT II - Altezza minima / RVR | 100 ft / 350 m |
| CAT III A/B - RVR | 200 m / 50 m |
| Frequenza interrogazione radar | 1.030 MHz |
| Frequenza risposta transponder | 1.090 MHz |
| Modo A (spaziatura impulsi) | 8 us |
| Modo C (spaziatura impulsi) | 21 us |
| Codici transponder disponibili | 4.096 |
| Codice emergenza | 7700 |
| Codice avaria radio | 7600 |
| Codice hijack | 7500 |
| Indirizzo modo S | 24 bit |
| Velocita onde EM | 300 m/us |