Modifica immagine
Anteprima immagine
Ricerca Google Immagini - Copia l'URL dell'immagine trovata
Scegli una fonte e clicca "Cerca"
Poiche e ormai definitivamente stabilito in ambito ICAO che il sistema satellitare GPS (Global Positioning System) e destinato a diventare - seppure con gradualita e in tempi diversi nelle varie aree del mondo e seppure integrato con altri sistemi simili - il sistema unico di navigazione globale per tutte le fasi del volo denominato GNSS (Global Navigation Satellite System), riteniamo opportuno approfondirne la descrizione oltre i limiti strettamente indispensabili per l'impiego.
Constatata l'inadeguatezza dei sistemi "terrestri" per giungere alla realizzazione di un sistema di navigazione globale, multiruolo, praticamente indistruttibile e inaccessibile, che fosse in grado - prima ancora che di guidare navi e aerei - di dirigere con la necessaria precisione i missili sui bersagli, i militari decisero di crearsi una costellazione di satelliti in orbita intorno alla Terra, intesi a inviare le necessarie informazioni ad appositi ricevitori i quali determinano la propria posizione impiegando calcolatori elettronici e orologi atomici.
Fu cosi che il Ministero della Difesa americano diede il via al GPS, mentre i militari russi partirono con il GLONASS (Global Orbiting Navigation Satellite System) a cui si fa cenno piu avanti.
In base ad accordi stipulati dal Ministero della Difesa americano con l'FAA e con l'ICAO, il sistema GPS e e sara disponibile per usi civili.
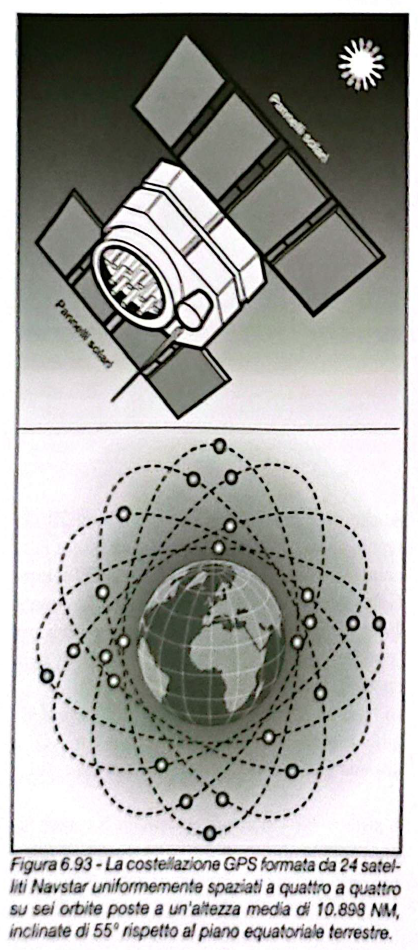
Il sistema GPS si avvale di satelliti Navstar costruiti dalla Rockwell International, aventi un ingombro di circa 5 metri x 5 metri con i pannelli solari estesi, e un peso di circa 8.650 chili. La vita media di un satellite Navstar della seconda generazione (Block II) e stimata in sette anni e mezzo. I pannelli solari, con una potenza di circa 400 watt, producono l'energia necessaria per il funzionamento dei sistemi di bordo. La stabilizzazione dei satelliti intorno ai loro tre assi e realizzata mediante piccoli motori a getto, mentre gli eventuali spostamenti orbitali sono realizzati mediante motori a idrazina.
La costellazione GPS, denominata anche segmento spaziale del sistema, e formata da 24 satelliti, di cui tre di scorta, uniformemente spaziati a quattro a quattro su sei diverse orbite, tutte situate alla quota di 20.169 km, e tutte inclinate di 55° rispetto al piano equatoriale terrestre. Ogni satellite percorre la propria orbita in poco meno di 12 ore.
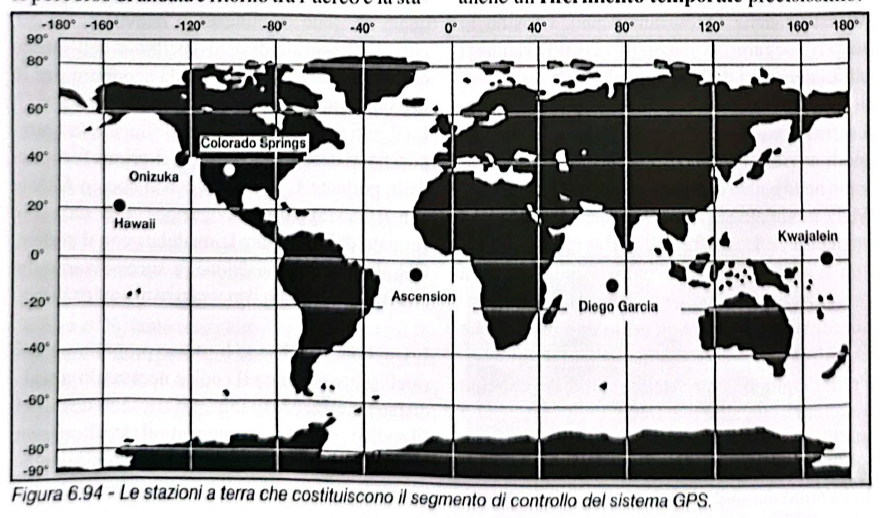
I satelliti sono controllati da terra mediante un insieme di stazioni ubicate nelle localita mostrate dalla figura 6.94, che nel loro insieme costituiscono il segmento di controllo del sistema. Tutte svolgono le funzioni di stazioni di sorveglianza (monitor station), tre svolgono le funzioni di stazioni di collegamento (uplink station), e quella di Colorado Springs svolge anche le funzioni di stazione principale (master control station), supportata da quella di Onizuka in caso di avarie alla funzione principale.
La stazione master, tramite le monitor, sorveglia il funzionamento generale del sistema e, tramite le uplink, invia ai satelliti i segnali necessari per correggerne la posizione (detta effemeride) e per ricalibrare giornalmente gli orologi atomici di bordo. La conoscenza dell'effemeride - cioe l'esatta posizione che ogni satellite occupa in ogni momento intorno alla Terra - e la perfetta sincronizzazione dei quattro orologi atomici di cui e dotato ogni satellite, sono indispensabili per ottenere la posizione tridimensionale dei ricevitori con la dovuta precisione.
Il terzo elemento del sistema GPS e il ricevitore, o segmento di utilizzazione, la cui antenna deve essere montata sulla parte alta della fusoliera affinche abbia sempre in vista i satelliti.
Essendo praticamente esente da ogni limitazione ambientale, il GPS e in grado di funzionare con un livello di precisione costante a qualunque ora del giorno e della notte, durante tutte le stagioni, qualunque siano le condizioni meteorologiche, e senza subire disturbi dall'attivita solare. Il completamento della costellazione GPS ebbe luogo verso la meta del 1993.
Il GPS determina la posizione ricavando tre linee di posizione circolari dalla misura delle distanze tra il ricevitore e altrettanti satelliti. Rispetto al DME - cui potrebbe in un certo senso essere assimilato - il GPS presenta pero sostanziali differenze strutturali e di funzionamento.
Infatti, mentre il DME misura il tempo impiegato da un impulso di energia elettromagnetica emesso da bordo dell'aereo a compiere il percorso di andata e ritorno tra l'aereo e la stazione, e lo trasforma in distanza moltiplicandolo per la meta della velocita della luce, il sistema GPS misura direttamente il tempo impiegato dai segnali emessi dai satelliti a raggiungere il ricevitore, e lo trasforma in distanza moltiplicandolo per la velocita della luce.
Mentre i sistemi attivi, per misurare il tempo tra l'inizio dell'interrogazione e la ricezione del segnale di ritorno, si avvalgono di un oscillatore al quarzo relativamente semplice e poco costoso, i sistemi passivi devono realizzare la sincronizzazione quasi perfetta tra l'emittente e la ricevente, per ottenere la quale e richiesto un orologio atomico stabilissimo e costosissimo a ognuna delle estremita del circuito (la stabilita richiesta per il GPS e di 10-13 secondi al secondo: in parole povere vuol dire che l'orologio non deve andare avanti o indietro di piu di 0,003 secondi ogni mille anni). In tal modo il GPS costituisce anche un riferimento temporale precisissimo.
Ogni satellite Navstar trasmette in due modi, denominati P (precision) e C/A (coarse/acquisition). Nel modo P, cui hanno accesso solo i militari e gli utilizzatori autorizzati, il sistema determina la posizione con un'approssimazione di 18 metri lateralmente e 28 metri verticalmente. Nel modo C/A, cui hanno accesso anche i civili, l'approssimazione e di norma pressoche uguale a quella del modo P, ma, per ragioni di sicurezza, puo essere volutamente degradata a circa 100 metri orizzontalmente e 150 metri verticalmente mediante l'attivazione del modo operativo denominato selective availability (SA), che significa appunto disponibilita selettiva.
La trasmissione dei segnali modulati nei due modi avviene su due frequenze UHF che si trovano nella banda L delle microonde: L1 = 1575.42 MHz modulata sia con il segnale C/A sia con il segnale P, e L2 = 1227.60 MHz, modulata solo con il segnale P. Come vedremo piu avanti, la presenza di due frequenze e necessaria per conoscere e compensare gli errori di propagazione ionosferica.
Per il "dialogo" tra i satelliti e la master station vengono usate altre due frequenze UHF: 2227.5 per l'uplink (da terra ai satelliti), e 1783.74 MHz per il downlink (dai satelliti a terra).
In ognuno dei due modi, ogni satellite trasmette un proprio segnale che, pur apparendo come strutturato secondo un codice puramente casuale, e in effetti generato dal computer che gli conferisce una struttura prevedibile e ripetibile, ed e percio chiamato codice pseudo casuale o pseudo random code (anche pseudo random noise).
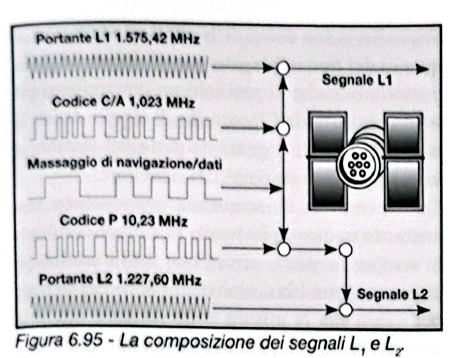
Sovraimposto a entrambi i codici C/A e P si trova anche un messaggio di navigazione/dati (NAV/data message) inviato da ogni satellite sulla frequenza di modulazione di 50 Hz, con il quale vengono comunicati ai ricevitori, tra gli altri, l'effemeride di ogni satellite e dell'intera costellazione, e le correzioni da apportare per il ritardo di propagazione ionosferica.
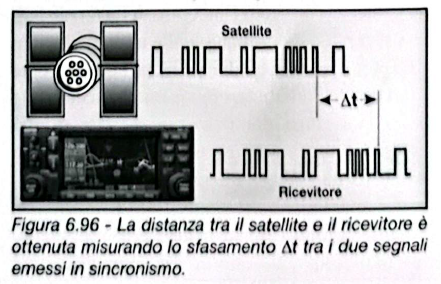
Una volta che il computer del ricevitore ha acquisito il codice da impiegare, cioe si e sincronizzato con il trasmettitore del satellite, e in grado di misurare lo sfasamento Δt tra il segnale del satellite e lo stesso segnale generato internamente al ricevitore, i quali hanno avuto origine nello stesso istante. Quanto maggiore e lo sfasamento, cioe il Δt, tanto maggiore e la distanza tra il satellite e il ricevitore, distanza che viene calcolata moltiplicando il Δt per la velocita della luce (circa 162.000 miglia nautiche al secondo).
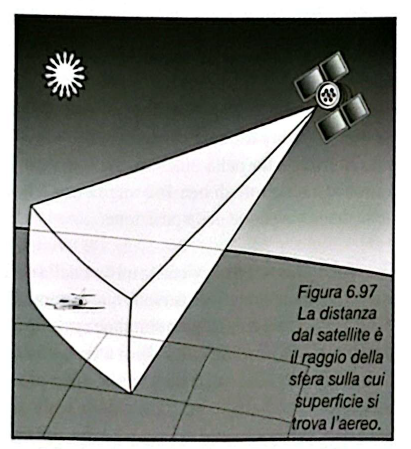
Se ci e dato conoscere la nostra distanza da un punto specifico dello spazio - per esempio un satellite Navstar - sappiamo anche di trovarci sulla superficie di una sfera di raggio pari alla distanza, centrato sul punto in cui si trova il satellite.
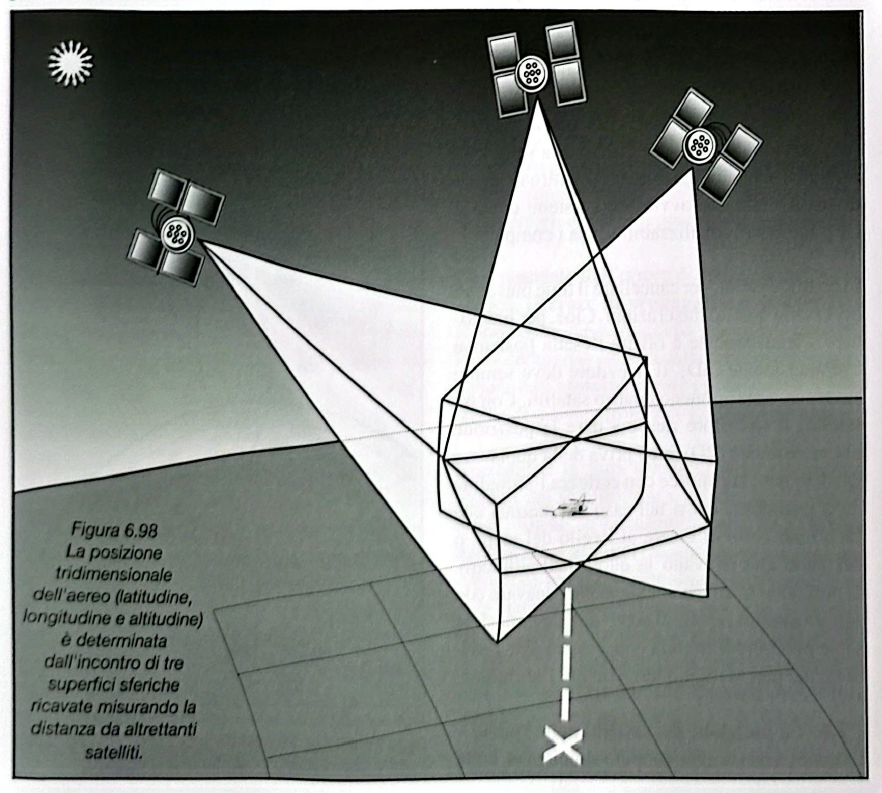
Con una prima misura di distanza da un satellite si ottiene percio una prima linea di posizione, che in realta e una superficie di posizione. Con due satelliti e due distanze il luogo dei possibili punti in cui si trova l'aereo viene ridotto a un cerchio, determinato dall'intersezione di due superfici sferiche. Introducendo un terzo satellite e una terza distanza si ottiene una terza superficie sferica, il cui incontro con il cerchio determinato dalle altre due costituisce la posizione tridimensionale dell'aereo espressa con latitudine, longitudine e altezza.
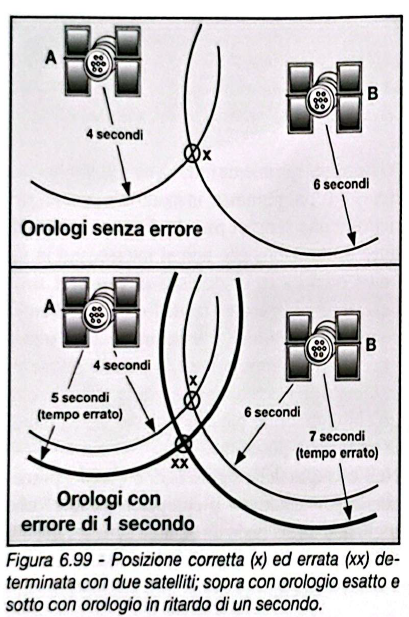
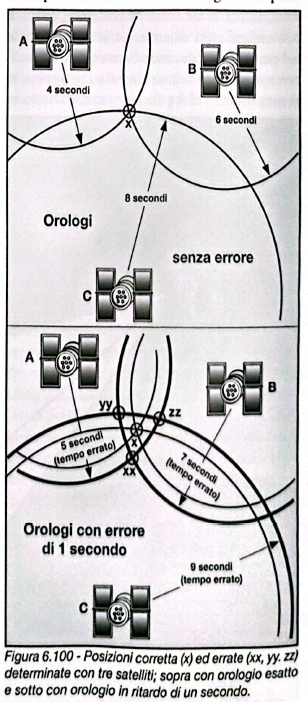
Poiche - come accennato poco sopra - solo i satelliti sono equipaggiati con orologi atomici, mentre i ricevitori sono dotati di "semplici" oscillatori al quarzo del tipo impiegato per gli apparati DME, e inevitabile che si verifichi un determinato errore di misura dell'intervallo di tempo Δt tra la trasmissione del segnale da parte del satellite e la sua ricezione da parte del ricevitore.
Questo errore, di ampiezza sconosciuta ma costante in quanto lo stesso ricevitore commette sempre lo stesso errore con tutti i satelliti, e chiamato time bias, cioe distorsione del tempo; per causa sua la misura delle distanze ottenute con gli orologi al quarzo, che sono diverse dalle distanze reali, sono chiamate pseudo range.
La conoscenza diretta, seppure simultanea, delle distanze da tre o quattro satelliti, non sarebbe di per se di grande utilita, anche in considerazione del fatto che i satelliti si muovono rispetto alla Terra alla velocita di circa 7.500 nodi. Per correlare con una posizione sulla Terra il punto dello spazio in cui si trova il ricevitore nel momento in cui fa il fix, e indispensabile che ogni satellite trasmetta continuamente la sua posizione, cioe la sua effemeride, cosicche il calcolatore del ricevitore possa esprimere il fix mediante una latitudine, una longitudine e un'altitudine.
La notevole altezza dell'orbita dei satelliti GPS, ben al di fuori dell'atmosfera terrestre, fa si che il tempo di rivoluzione si mantenga molto prossimo al valore teorico, e percio la posizione di ogni satellite possa essere precalcolata e messa nella memoria dei ricevitori.
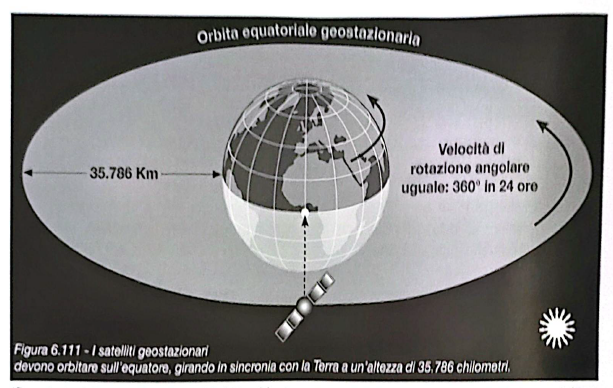
Oltre a cio, al fine di rendere massima la precisione del sistema, la posizione dei satelliti lungo le rispettive orbite viene continuamente controllata, ed eventualmente corretta, da terra. Una delle ragioni per cui i satelliti GPS non sono posti in orbite geostazionarie, e di far si che ognuno passi due volte al giorno sulle stazioni di controllo: che a ogni transito provvedono a misurare altitudine, posizione e velocita del satellite, e a ridurre al minimo i cosiddetti errori di effemeride causati dall'attrazione del sole e della luna, dalla pressione della radiazione solare, nonche dai seppur modesti effetti della relativita sul tempo.
Anche se la precisione del sistema GPS e da capogiro, e possibile analizzare l'approssimazione residua, e notare come essa sia dovuta al cumulo di piccoli errori che le attuali tecnologie non consentono ancora di eliminare.
| Tipo di errore | Entita media | Causa |
|---|---|---|
| Propagazione ionosferica | Variabile | Rifrazione dovuta a diminuzione della velocita di propagazione |
| Propagazione atmosferica | 12 piedi (3,6 m) | Variazione della velocita di propagazione causata dal vapore acqueo |
| Orologi atomici | 2 piedi (60 cm) | Time bias ineliminabile degli orologi al quarzo |
| Ricevitori | 4 piedi (1,2 m) | Interferenze elettriche, correlazione errata del segnale |
| Effemeride | 2 piedi (60 cm) | Satelliti non esattamente nella posizione prevista |
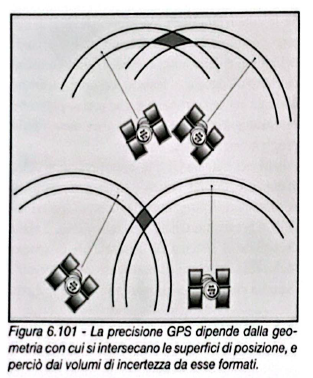
Il fattore ultimo da cui dipende la precisione del GPS e la diluizione della precisione dovuta alla geometria dei satelliti o GDOP (Geometric Dilution Of Precision). A causa dei seppur piccoli errori del sistema, le linee di posizione ottenute dalla determinazione della distanza del ricevitore dai satelliti, sono in effetti corone circolari che presentano sempre e comunque un certo spessore.
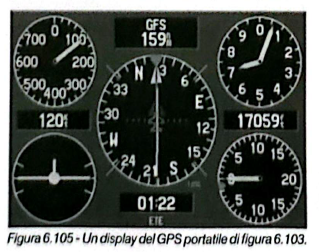
Cio che il sistema GPS (cosi come qualunque altro sistema di navigazione d'area) e in grado di fornire di suo in termini di informazioni di volo - oltre al tempo - e solo la posizione tridimensionale dell'aereo espressa mediante le coordinate geografiche (approssimate al centesimo o al millesimo di primo di grado) e l'altitudine sul livello del mare. Tutte le altre informazioni che compaiono sui display degli apparati di bordo sono ottenute grazie al computer accoppiato al ricevitore, il quale elabora in continuazione e in rapidissima sequenza le variazioni di posizione dell'aereo sia in direzione sia in velocita.
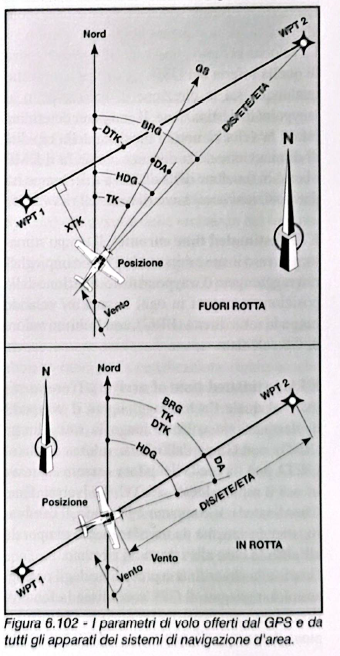
| Parametro | Sigla | Descrizione |
|---|---|---|
| Waypoint | WPT | Qualunque punto della superficie terrestre le cui coordinate geografiche sono nella memoria del computer |
| Posizione | - | Coordinate geografiche e quota in ogni istante |
| Track | TK/TRK | Traiettoria di volo, angolo (001°-360°) che il percorso effettivo forma con il nord |
| Desired Track | DTK | Rotta desiderata, angolo formato dal percorso ortodromico tra due waypoint con il nord |
| Bearing | BRG | Rilevamento verso il waypoint di destinazione dalla posizione attuale |
| Heading | HDG | Prua dell'aereo, angolo che l'asse longitudinale forma con il nord |
| Drift Angle | DA | Angolo di deriva, differenza algebrica tra HDG e TK/TRK |
| Distance | DIS | Distanza dall'aereo al waypoint di destinazione |
| Cross Track Error | XTK | Distanza considerata errore tra la posizione attuale e la rotta desiderata (DTK) |
| Ground Speed | GS/SPD | Velocita al suolo in kt, mph o Km/h |
| Estimated Time Enroute | ETE | Tempo stimato per raggiungere il waypoint dalla posizione attuale |
| Estimated Time of Arrival | ETA | Orario stimato di arrivo al waypoint |
| Vento | - | Direzione di provenienza e velocita alla quota di volo (solo con TAS e HDG) |
Sappiamo che un ricevitore GPS, qualunque sia l'impiego cui e destinato, deve acquisire il segnale di almeno quattro satelliti, ed eseguire i calcoli necessari per ricavare la posizione rispetto alla superficie terrestre, espressa con latitudine, longitudine, e altitudine.
| Tipo ricevitore | Caratteristiche | Uso tipico |
|---|---|---|
| Monocanale | Interruzione automatica del funzionamento, determina posizione saltuariamente | Escursionisti, barche a vela, bassa velocita |
| Bicanale | Un canale aggancia satelliti, l'altro elabora dati | Uso generale, prestazioni migliori |
| Multicanale | Riceve fino a dodici satelliti simultaneamente, minore GDOP | Aerei, missili balistici, alta precisione |
I computer dei ricevitori certificati per gli avvicinamenti IFR devono essere programmati con la funzione RAIM (Receiver Autonomous Integrity Monitoring), grazie alla quale riescono a determinare autonomamente e con sufficiente anticipo sull'orario di arrivo dell'aeromobile sui waypoint della procedura, se il segnale e la geometria dei satelliti saranno pari o migliori del livello minimo prescritto. In caso negativo il ricevitore avverte il pilota con un segnale ottico e con un messaggio scritto, che la procedura non potra essere legalmente eseguita.
Per utilizzare proficuamente un apparato GPS (cosi come qualunque altro dispositivo elettronico), il pilota deve prima imparare a conoscerlo e acquisire sufficiente destrezza nella manipolazione dei pulsanti e dei pomelli mediante i quali il computer riceve le istruzioni necessarie per svolgere le molteplici funzioni di cui e capace.
Cio che invece - per fortuna - accomuna ormai tutti i ricevitori aeronautici e la struttura e l'organizzazione del data-base di navigazione, che e quello sviluppato dalla Jeppesen.
La guida alla navigazione offerta dagli apparati GPS e in pratica sempre un QDM, cioe una rotta da seguire verso un waypoint. Per navigare usufruendo di tutti i dati che il sistema e in grado di offrire, il pilota puo scegliere tra due alternative:
Pochi anni dopo il completamento della costellazione, il GPS, almeno nell'ambito dell'aviazione civile, era gia potenzialmente sfruttato al massimo delle sue capacita. In questo brevissimo lasso di tempo il GPS infatti ha reso possibili sia la navigazione d'area su tutta la superficie del globo con una precisione prima inimmaginabile, sia gli avvicinamenti strumentali non di precisione verso qualunque superficie idonea all'atterraggio.
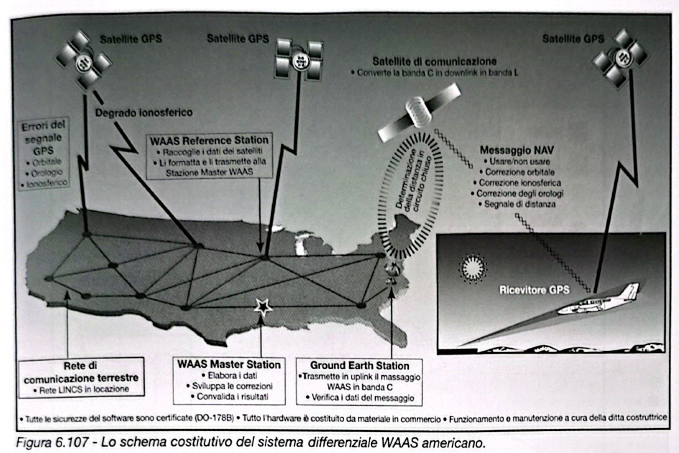
Poiche gli errori intrinseci del GPS, amplificati dalla sempre possibile introduzione della selective availability da parte dei militari, e ben lunghi dal garantire i limiti sopra citati, il sistema nella configurazione "grezza" non puo essere usato per gli avvicinamenti di precisione, a meno che non venga supportato da un sistema capace di aumentarne la precisione. Tale sistema esiste con il nome di GPS differenziale DGPS (Differential GPS).
Una volta quantificati gli errori, le stazioni di riferimento - come se fossero esse stesse satelliti (e percio chiamate anche pseudolites, cioe pseudo-satelliti) - ritrasmettono in continuazione un segnale privo di errori. Avvalendosi del quale, i ricevitori degli aerei operanti nell'area di copertura sono in grado di determinare la propria posizione con precisione praticamente assoluta.
I sistemi di correzione differenziale previsti dal GNSS, chiamati anche sistemi di aumento della qualita dei segnali GPS, GLONASS, Galileo o altri, sono di due tipi:
Il nord America e l'area del mondo in cui la realizzazione del GNSS e piu avanzata. Nel 2005 l'FAA ha infatti attivato il proprio WAAS che copre il territorio degli Stati Uniti fino all'Alaska e il Pacifico fino alle Hawaii. Nel frattempo il Canada ha attivato il proprio GPS-C (GPS Correction).
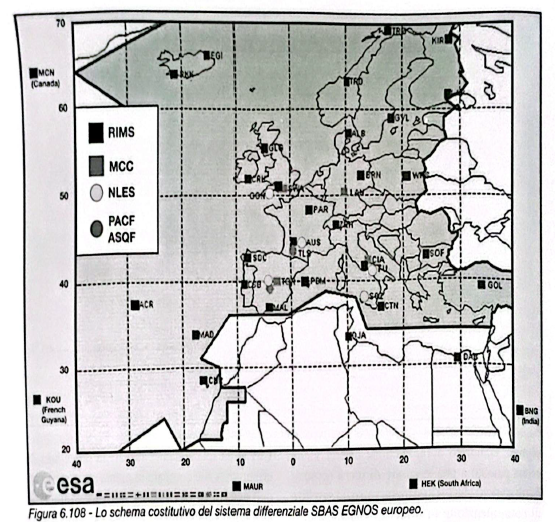
In Europa il sistema SBAS corrispondente al WAAS americano - con il quale e ovviamente compatibile secondo gli standard GNSS - e denominato EGNOS (European Geostationary Navigation Overlay Service). Progettato dall'agenzia spaziale europea ESA con il concorso di Eurocontrol e di una Commissione della comunita europea - che costituiscono il gruppo tripartito europeo ETG (European Tripartite Group) - EGNOS ha cominciato a rendere disponibile il proprio segnale in luglio 2005 a livello sperimentale con una precisione di 2 metri, e ha ricevuto la certificazione per l'entrata in servizio ufficiale nel 2009.
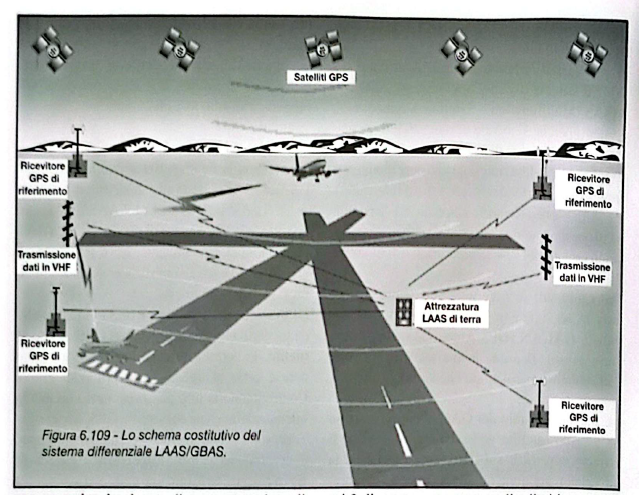
La differenza che, invece di servire un'area delle dimensioni di un continente, serve solo l'area di un aeroporto e le sue immediate vicinanze in un raggio di circa 40 miglia. L'attrezzatura LAAS, mediando i segnali dei diversi ricevitori GPS di riferimento, formula un messaggio di correzione che viene irradiato in data-link su una frequenza VHF della banda di navigazione (108.00-117.95), a beneficio dei ricevitori di navigazione degli aerei presenti entro l'area di copertura.
GLONASS (GLObal Orbiting NAvigation Satellite System) fu la risposta sovietica al GPS americano, iniziata con il lancio del primo satellite nel 1982 e ultimata nel 1995.
La costellazione e costituita da 24 satelliti - di cui 3 di scorta - equamente distribuiti su tre orbite quasi circolari inclinate di 64,8° e separate di 120°, poste all'altezza di 19.100 chilometri, che danno un periodo di rivoluzione di 11 ore e 15 minuti. La costellazione completa permette di avere sempre in vista almeno 5 satelliti da qualunque punto della Terra.
| Caratteristica | GPS | GLONASS |
|---|---|---|
| Numero satelliti | 24 (+ 3 scorta) | 24 (+ 3 scorta) |
| Orbite | 6 orbite | 3 orbite |
| Inclinazione | 55° | 64,8° |
| Altezza | 20.169 km | 19.100 km |
| Periodo rivoluzione | ~12 ore | 11 ore 15 min |
| Sistema coordinate | WGS-84 | PZ-90 |
| Precisione segnale SP | ~18 m | 60 m (oriz) / 75 m (vert) |
Anche i satelliti GLONASS trasmettono due segnali, uno di precisione standard SP e uno di alta precisione HP. Pero - a differenza del GPS che impiega una sola frequenza per tutti i satelliti e individua il segnale di ognuno mediante codificazione - il segnale GLONASS usa la suddivisione di frequenza. In altre parole a ognuno dei 24 satelliti e assegnata una frequenza L1 nella banda che va da 1602,5625 a 1615,5000 MHz sulla quale trasmette il segnale SP, e una frequenza L2 nella banda che va da 1.240,00 a 1.260 MHz sulla quale trasmette il segnale HP.
Gia nel 1996 l'ICAO accetto la proposta delle autorita russe di rendere il GLONASS disponibile per la comunita aeronautica mondiale. In seguito a cio alcune ditte russe cominciarono a sviluppare ricevitori GLONASS per l'aviazione civile, per lo piu integrati con ricevitori GPS, cosi da renderli piu appetibili sul mercato. Come sappiamo il sistema europeo EGNOS e in grado di correggere sia il segnale GPS sia quello GLONASS.
Galileo e il nome che l'Unione Europea e la sua agenzia spaziale ESA (European Space Agency) hanno dato al costruendo sistema satellitare in onore di Galileo Galilei. Sistema voluto come alternativa al GPS americano e al GLONASS russo per rendere gli Stati ECAC indipendenti da qualsiasi tipo di decisione negativa che Washington o Mosca potessero prendere in caso di conflitto o dissapori politici.
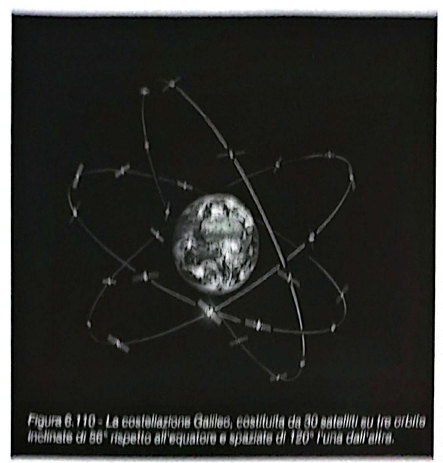
La costellazione sara composta di 30 satelliti - di cui tre di scorta - equamente spaziati su tre orbite inclinate di 56° e tra loro distanziate di 120°, poste all'altezza di 23.222 Km. I satelliti avranno vita media di 12 anni, peso di 675 Kg, apertura di 18,7 m con i pannelli solari aperti, e potenza elettrica di 1.500 Watt.
| Servizio Galileo | Caratteristiche | Precisione |
|---|---|---|
| OS (Open Service) | Accessibile a chiunque, gratuito | 4 m (oriz) / 8 m (vert) con due bande |
| CS (Commercial Service) | Accessibile a pagamento, tre bande | < 1 m (< 10 cm con LAAS) |
| PRS (Public Regulated Service) | Crittato, forze armate, polizia, ATC | Come OS, immune a interferenze |
| SoLS (Safety of Life Service) | Crittato, applicazioni critiche | Come OS, immune a interferenze |
Nonostante abbiano firmato l'accordo di cooperazione con l'Unione Europea per la realizzazione e lo sfruttamento del Galileo, la Cina e l'India hanno entrambe un loro programma di realizzazione di sistemi di navigazione satellitare.
Sappiamo che gli ELT (Emergency Locator Transmitter) sono trasmettitori i cui segnali hanno lo scopo di facilitare il ritrovamento di aeromobili che abbiano dovuto atterrare in emergenza o che siano caduti in localita sconosciute. ELT e la denominazione prettamente aeronautica dei trasmettitori di emergenza; nel piu vasto ambito dell'Unione Internazionale delle Telecomunicazioni (ITU) sono chiamati EPIRB (Emergency Position Indicating Radio Beacon).
Alimentati da una propria batteria che ha una durata di circa 48 ore, si attivano automaticamente quando sottoposti ad accelerazioni maggiori di 6 g (urto dell'aeromobile con il terreno), oppure possono essere attivati manualmente mediante un apposito interruttore.
| Concetto | Valore/Informazione |
|---|---|
| Inizio tempo GPS | 00:00:00 UTC del 6 gennaio 1980 |
| Numero satelliti GPS | 24 satelliti (+ 3 scorta) su 6 orbite |
| Quota orbita GPS | 20.169 km |
| Inclinazione orbite GPS | 55° rispetto all'equatore |
| Periodo orbitale | ~12 ore |
| Satelliti minimi in vista | 6 (di cui almeno 4 per il fix 3D) |
| Frequenza L1 | 1575.42 MHz (C/A e P) |
| Frequenza L2 | 1227.60 MHz (solo P) |
| Sistema di riferimento | WGS-84 |
| Satelliti per fix 3D | 4 satelliti |
| Satelliti per fix 2D | 3 satelliti |
| GDOP tipico | 4-6 (moltiplicatore degli errori) |
| WAAS (USA) | Sistema SBAS americano, operativo dal 2005 |
| EGNOS (Europa) | Sistema SBAS europeo, certificato 2009 |
| LAAS/GBAS | Sistema locale per CAT III, raggio ~40 NM |
| GLONASS | 24 satelliti, 3 orbite, 19.100 km, 64,8° |
| Galileo | 30 satelliti, 3 orbite, 23.222 km, 56° |
| ELT frequenze | 121.50 MHz e 406 MHz |
| Durata batteria ELT | 48 ore |